Controlling the ROV
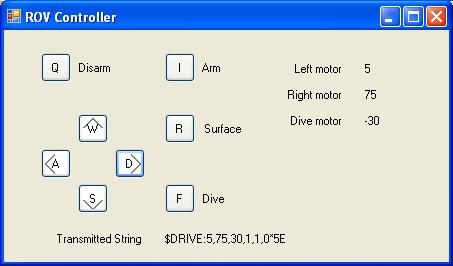
Yesterday I picked up Visual basic again after a 3 year absence and threw together a controller for the ROV. This is initially just for prototyping and will enable the user to control each of the 3 thrusters, as well as arming and disarming the ROV.
I have initially chosen a standard similar to the NEMA standard used by GPS recievers. This is a simple layout with comma delimiters, an XOR based checksum and clearly defined message bounds ($ and *).
posted by Robert Ross @ 3:55 PM
![]()

0 Comments:
Post a Comment
<< Home