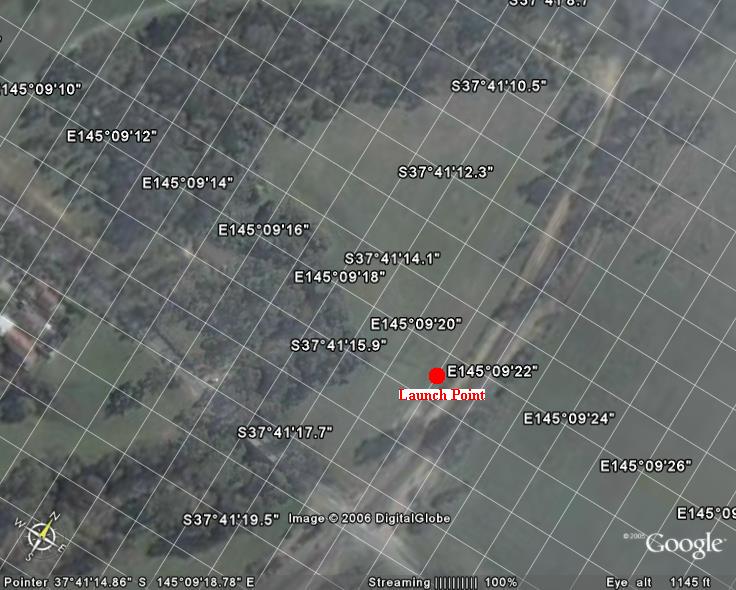
Finally most of the bugs have been ironed out of the flash memory card logging software allowing us to go flying around and actually logging the flight data. The Google Earth (TM) picture on the right shows the flying ground (with a red dot marking the launch point).
A
log file was downloaded from the plane on landing from the onboard MMC card. One little bug I need to fix is printing the latitudes and longditues as signed longs - not unsigned longs (hence the very large values). But these can be easily fixed.
The data is stored in the following formats (which I created today):
For ADC sensor data:
Format: "$UAVADC,BA:720,TE:323,PR:9,AX:353,AY:453*"
BA = Battery
TE = Temperature
PR = Pressure
AX = Accelerometer X
AY = Accelerometer Y
For GPS data:
Format: "$UAVGPS,TS:1794299271,LA:-22432475,LO:73183416,AL:93,BE:315,RG:1,GG:1*"
TS = Time Stamp (multiplied by 1000
LA = Latitude (mulplied by 60000)
LO = Longitude (mulitplied by 60000)
AL = Altidude (MSL)
BE = Bearing (Degrees)
RG = RMCGood (1 = good, 0 = bad)
GG = GGAGood (1 = good, 0 = bad)
For magnetometer data
Format: "$UAVMAG,BE:321,AX:-224,AY:716*"
BE = Bearing (Degrees)
AX = Axis X value
AY = Axis Y value
And yes - I too was pretty astounded to have got the plane upto around 300m (above ground) - I figured we would be struggling to get 150m